SENAV – Smart Space Exploration Navigation
Project Description
Upcoming space exploration missions envisage precise and safe landing on planetary bodies as well as navigating orbiters, landers, space drones, and robots. Such missions will be performed at various distances from Earth, reaching from the vicinity of Earth and Moon out to several astronomical units for targets like Mars, asteroids or the icy moons of Jupiter and Saturn. A reliable execution of the operations mentioned above can only be achieved by implementing spacecraft autonomous operation and utilizing the target body as a navigation reference. This brings a novel requirement for the incorporation of a higher-than-before grade of knowledge about the target, based on a-priori data and on measurements collected during the mission. Examples are globally geo-referenced features originating from mapping missions or the 3D structure of the landing area measured by the spacecraft in the final phase of a landing. This introduces the need for significantly improved of on-board processing capabilities and smart algorithms for a wide range of space exploration missions with differentiated demands. Thus, SENAV aims to enable breakthroughs in technologies and scientific instrumentation for space science and exploration missions including those described in the Global Exploration Roadmap, with a strong focus on optical navigation for orbiters, landers, drones, and robots. In order to enable these missions, SENAV will start (at TRL2-3) to develop and advance smart algorithms, optimized software solutions and miniaturized HW modules, all to be validated through analogous test in laboratory environment aiming to achieve TRL4 for all HW and SW technologies. Consequent optimization of the payload data processing system accompanied by use of COTS components, as well as the miniaturization of high-performance hardware for integration into small space platforms, will contribute to the desired technological breakthroughs.
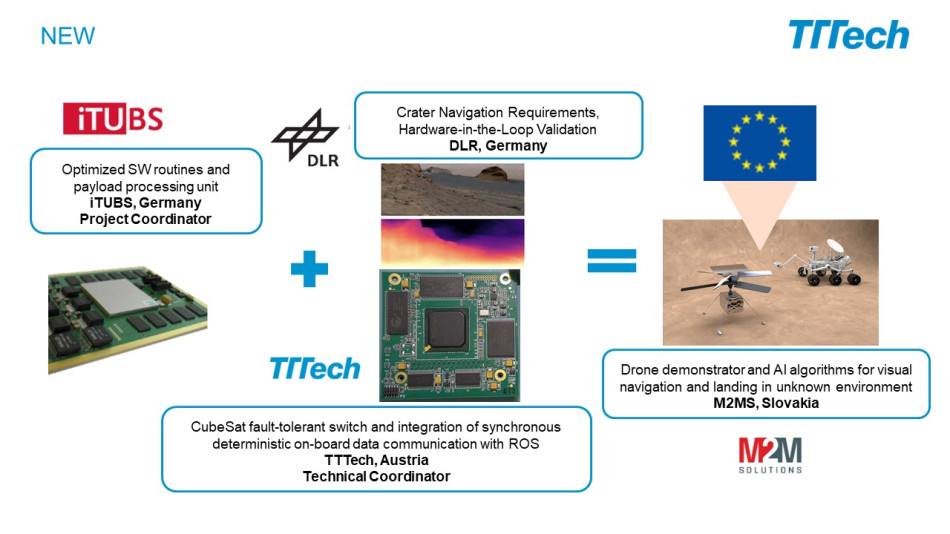
SENAV’s innovations will leverage the expertise of a very strong consortium, which is composed of 4 organizations comprising of: M2M Solutions, an SME from Slovakia, two experienced industrial partners TTTech Computertechnik AG and iTUBS from Austria and Germany respectively, and the renowned research center DLR from Germany. These partners who are experts in their respective areas of the space domain, are representative of the complete set of owners of the data processing chain: the end user is represented by DLR and by the contacts that TTTech, iTUBS and M2MS have with their customers. The mission planning aspects are represented by DLR, and M2MS. The space agencies and standardization bodies are represented by DLR, and TTTech and the technical solution providers are represented by iTUBS, TTTech, M2MS, as well as DLR who will be contributing their technical expertise to achieve the SENAV project goals as follows:
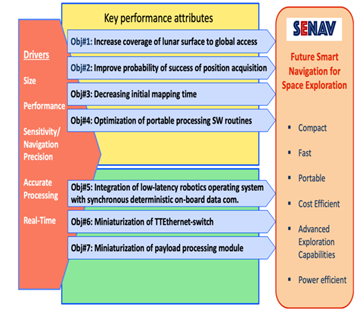
- Objective 1: Increase coverage of lunar/cratered body surface to global access
- Objective 2: Improve probability of success of position acquisition mode (LiS mode, i.e. lost-in-space)
- Objective 3: Decreasing initial mapping time with impact to fast cameras and sensors calibration in unknown environments
- Objective 4: Optimization of portable processing SW routines to enable enhanced optical navigation
- Objective 5: Integration of low-latency robotics operating system with synchronous deterministic on-board data communication
- Objective 6: Miniaturization of TTEthernet-switch to be usable in small space platforms
- Objective 7: Miniaturization of payload processing module to be usable in small space platforms
This project has received funding from the European Union’s Horizon Europe research and innovation programme under grant agreement No 101082476.

The main goal of TTTech in the SENAV project is to carry out research into the topic of safety and performance of landers, drones, robots control systems. TTTech leads the work package covering processing system HW and system integration and is Technical Coordinator of SENAV. TTTech will define requirements for on-board communication and contribute to the overall requirements definition, will contribute to system SW related specifications, and specify the interfaces for scalable HW and formfactor. Design, manufacturing, assembling, and integrating HW for the on-board communication (miniaturized fault-tolerant Deterministic Ethernet switch) will be the main activities of the company followed by the evaluation and leading the overall HW validation.
The proposed integration and synchronization of the ROS middleware with the deterministic underlying TTEthernet will provide an ideal platform for autonomous robotic applications (including AI) in space, guaranteeing determinism, fault-tolerance, simplification of complex design and optimization of system resources allocation and utilization.
Bernhard Lutzer
bernhard.lutzer@tttech.com